激光位移傳感器
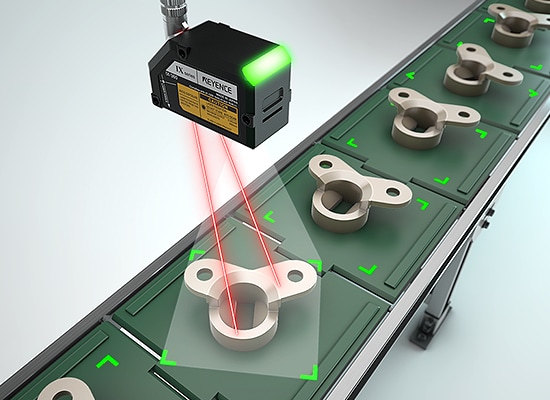
1D激光位移計包括:以同軸發射并接收激光的“共焦方式”和接收投光反射光的光路呈三角形的“三角測距方式”。可根據用途或工件材質(透明度或光澤等)、安裝距離等,選擇合適的激光位移計,測量高度、厚度、寬度等。
產品陣容

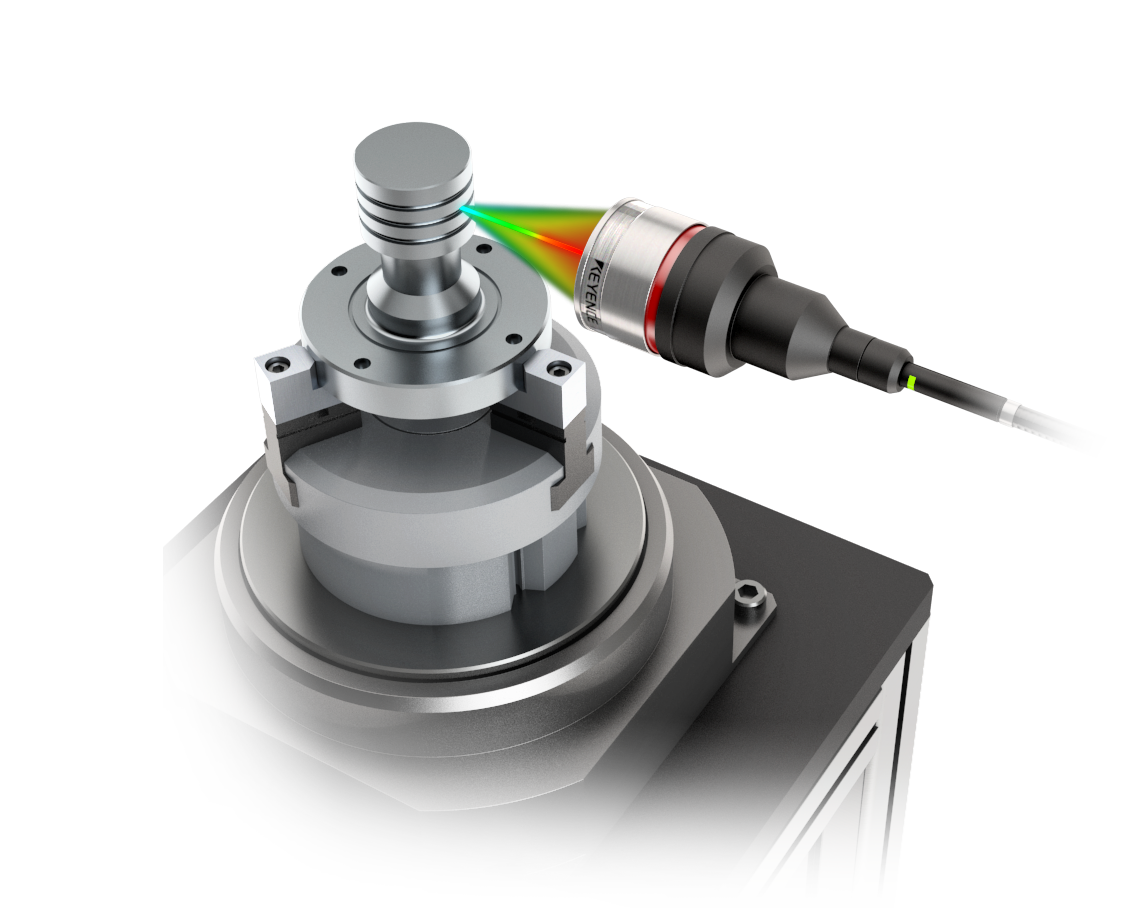
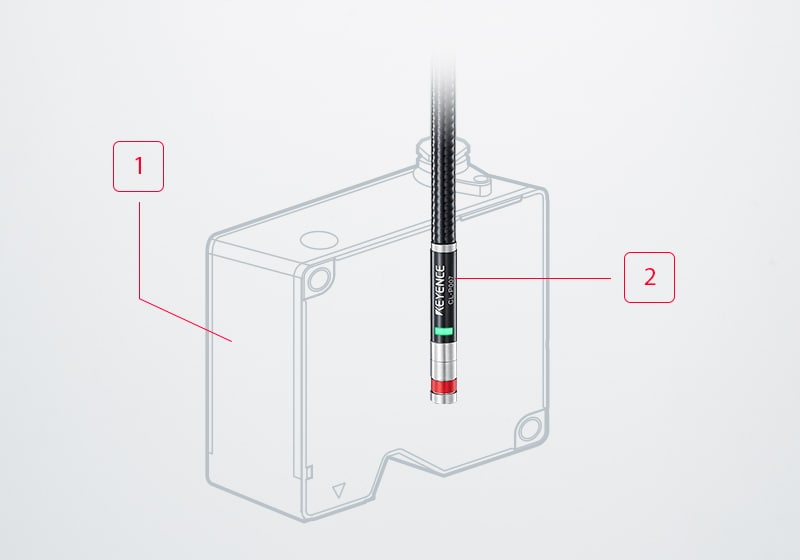
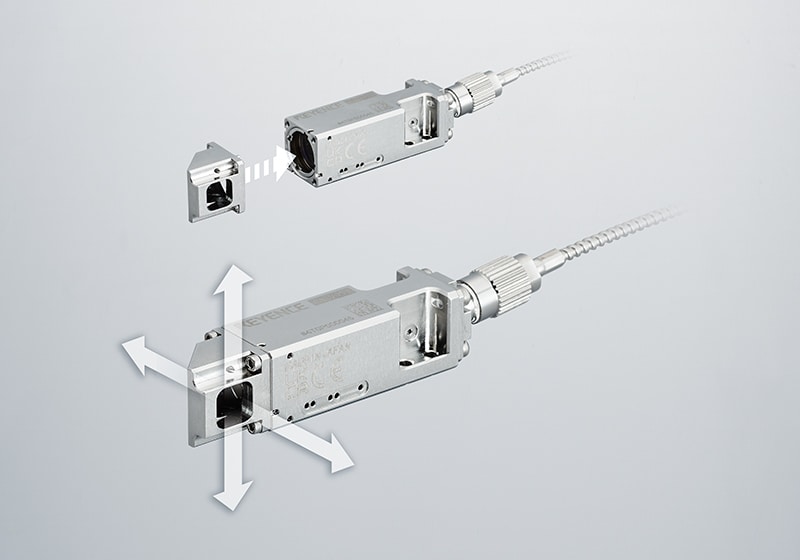
CL-3000 系列彩色激光同軸位移計是緊湊型一維激光位移傳感器,其采用獨特測量方式,可對各種表面材質的工件進行高精度的測量。借助“共焦原理”,該系列傳感器無需調整安裝方式或測量設置,就能對從深色橡膠到透明薄膜等各類材質實現穩定測量。CL系列探頭內部僅有鏡頭結構設計,兼具緊湊結構與輕量化特性,非常適合安裝在狹窄空間內或機器人上。有關電子元件均遠離光學單元中的測量位置,由此得出的測量結果穩定性高,且不易受熱量或電噪聲干擾。該系列傳感器配備Quad處理系統、光軸調整等功能,適用于多種行業及應用場景(包括位置測量與厚度測量),即使粗糙表面,也能進行高精度測量。



LK-G5000 系列激光三角位移傳感器為非接觸式位移測量應用提供高速度與高精度支持。該系列傳感器采用 RS-CMOS、HDE 鏡頭組等先進硬件,可對多種材質的工件進行穩定可靠的測量。這項技術使該傳感器具備卓越的線性度(0.02% F.S.)與重復性(0.005 μm)。LK-G5000 系列的最大采樣速度可達 392 千赫茲(392 kHz),能夠可靠監振動情況,捕捉高速移動目標的細微變化。該系列傳感器擁有豐富的產品型號,可適配多種行業與應用場景,用戶可根據自身對測量范圍、精度及光斑尺寸的需求,選擇適合的傳感器。



LK-G3000 系列激光位移傳感器采用Li-CCD與高精度Ernostar 物鏡,實現了高精度的測量。該系列傳感器擁有豐富的產品型號,最大測量距離達 1000mm,可適配對高精度或對安裝距離有需求的應用場景,為位移測量提供了靈活的解決方案。此外,傳感器搭載ABLE 功能配合全新開發的測量算法,能夠感測物體表面并將激光強度調整到理想狀態,從而實現對透明材質、橡膠或金屬等材質的穩定測量。


基恩士的一維激光位移傳感器能夠實現對目標物高度、位置或距離的非接觸測量。通過組合多個傳感器,還可以進行厚度和寬度等測量。高精度位移傳感器主要分為兩類:共焦型和激光三角測量型。這兩種類型都能為非接觸測量提供準確可靠的解決方案,但根據應用場景的不同,一種類型可能比另一種更具優勢。
以下將介紹一維激光位移傳感器的各種類型、測量原理及其優點。
多色共焦法
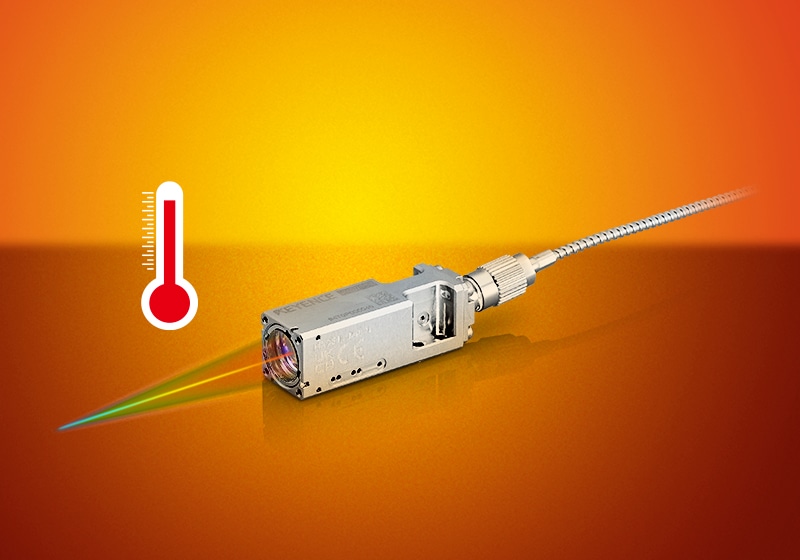
共焦位移傳感器在同一軸線上發射和接收光線。多色共焦傳感器使用能夠發射多種顏色(波長)光的光源,每種顏色都有獨特的焦距。傳感器通過檢測當前聚焦在目標上的顏色來測量到表面的距離。基恩士的CL-3000 系列傳感器采用明亮的光源,該設備設計用于在不同表面反射率條件下,提供整個測量范圍內的穩定測量結果。
激光三角測量法
基于激光三角測量的位移傳感器利用從目標反射回來的光的返回角度來計算位置。傳感器發射激光,激光被目標表面反射。部分反射光通過透鏡聚焦到傳感器頭部的接收元件上。根據目標與傳感器之間的距離,光的返回角度會發生變化,從而在接收器上形成不同的位置,這些變化可以被檢測到。LK-G5000 系列采用高分辨率CMOS,能夠穩定地測量微小的位移變化。
激光位移傳感器的優點
這些傳感器能夠測量多種材料和特性的目標物的主要原因之一,是它們能夠進行高精度的非接觸測量。可以根據應用或目標材料(如透明或光亮目標)選擇合適的激光位移傳感器。
如果被測物體是金屬或其他不易劃傷的硬質材料,可以使用卡尺、千分尺等直接接觸被測物體的儀器,或在在線情況下使用LVDT等接觸式位移傳感器進行測量。然而,當被測物體較軟時,測量壓力可能會導致誤差。對于如晶圓、薄膜以及敏感的發絲狀金屬表面等因接觸而影響品質的精密目標,可以使用非接觸式激光位移傳感器進行測量,無需擔心誤差和目標損傷。由于激光位移傳感器即使在透明或光亮表面也能實現穩定的非接觸測量,因此可應用于各種場合。
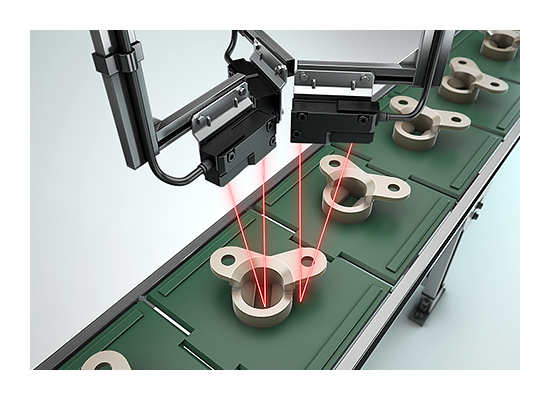
涂層、焊接、元件安裝等工藝的自動化需要精確的設備定位。基恩士多色共焦法激光位移傳感器的緊湊輕量型傳感頭可輕松安裝在設備上,能夠精確測定與目標之間的距離,實現高精度的位置控制,同時不影響設備運行。
通過將分光單元與傳感頭分離,僅將鏡頭作為傳感頭的關鍵部件,CL-3000 系列共焦位移傳感器實現了緊湊輕量的傳感頭,可輕松安裝在各類設備中。測量采用同軸光路,因此即使是目標物體的狹窄間隙高度也能全方位測量。此外,傳感頭不會因熱量或電氣/磁噪聲產生誤差,確保測量穩定。對于設備控制,激光位移傳感器能夠高速測量目標高度,并將信息反饋給控制設備,從而實現對階梯狀目標或輸送過程中略有傾斜目標的實時高度測量,保證自動化工藝中的品質穩定。
激光位移傳感器的導入案例
玻璃(單面帶圖案)厚度測量
當玻璃表面與圖案表面的反射率不同,用激光位移傳感器分別從玻璃兩側測量厚度時,在圖案表面可能會出現跟蹤誤差。CL-3000 系列共焦位移傳感器采用多色共焦法,通過測量投射光聚焦的位置,實現了不易受目標反射光強差異影響的穩定高精度測量,從而有效減少跟蹤誤差,提高檢測節拍。
點膠噴嘴高度測量與控制
要實現高水平、高精度的自動點膠,不僅需要高性能的點膠機器人,還需要與噴嘴同步移動、作為“眼睛”的高性能位移傳感器。將CL-3000 系列共焦位移傳感器安裝在跟隨點膠噴嘴的位置,可通過實時測量和反饋目標高度,實現噴嘴高度控制。緊湊輕量的傳感頭可輕松安裝在噴嘴旁邊,并在停止作業時減少殘余振動。多色共焦技術采用同軸系統,提供更寬的測量范圍,確保在材料為透明、鏡面或光亮表面,或形狀為凹面、高低差、傾斜或圓弧等情況下,依然能夠穩定進行高度測量和反饋控制。

激光位移傳感器相關的常見問題
CL-3000 系列共焦位移傳感器不僅可以穩定地高精度測量透明玻璃,還可以測量各種目標材料和形狀。當然,非接觸式測量減少了損壞玻璃的擔憂。CL-3000 系列至多可將六個測頭同時連接到一個控制器。例如,可以通過一個控制器和五個測頭組成的系統,測量玻璃的四個邊和中心,從而穩定地檢查玻璃的平整度,或者用四到六個測頭測量六個端點。此外,如上所述,所有傳感器都小巧輕便,適合安裝在狹小空間或機械臂上。電子元件被安置在光學單元之外,遠離測量位置,因此可以提供幾乎不受熱量和電磁噪聲影響的穩定測量結果。
由于激光穿透PCB內部或其焊錫掩膜(這是一種通常有多種顏色的漆類材料),常常會產生漫反射。焊錫掩膜的半透明特性和不同顏色組合,在用激光位移傳感器測量時可能導致漫反射,從而造成測量數值不穩定。基恩士CL-3000 系列共焦位移傳感器可以發射多種波長的激光,僅計算和測量使目標表面聚焦的那一波段的光。即使是容易被光穿透的PCB、玻璃、硅片、微型透鏡等目標,也能高精度獲得穩定的測量數值。這項技術的優勢在于,甚至可以在不接觸表面的情況下,測量肥皂泡表面的位移。
距離位移傳感器的用途是測量物體相對于參考點的移動量或位移。由于其設計,這些傳感器通常可以測量微米甚至納米級別的位移,有些型號甚至能測量比納米更精細的位移。在制造領域,這些傳感器的主要用途是實現位置的精確測量,這一功能有著廣泛的應用。測量位置可以幫助我們了解物體的運動。例如,可以用于監控機械在特定范圍內的運行,也可用于質量控制。后者尤為重要,因為它與計量相關,通過測量位移可以檢查產品的精確尺寸規格。
有幾個因素在確定適合您應用的傳感器時起著關鍵作用,確保設備及其測量方法適合您的具體需求。量程、分辨率和精度無疑是選擇位移測量時重要的因素。然而,如上所述,并非所有測量方法都適用于所有材料,有些傳感器在檢測特定材料時表現更佳。您還應考慮采樣速度,特別是在測量動態位移時,這時需要選擇采樣速度足夠快的傳感器。
雖然它們都是非接觸式激光位移傳感器,但共焦傳感器和激光三角測量傳感器的工作原理有本質區別,因此適用于不同的應用。激光三角測量依靠將光照射到表面,并測量表面反射到接收元件的光。反射光角度的變化都與目標表面的位移成正比。而共焦傳感器則發射多種波長的光,并檢測哪一波長在目標表面聚焦。隨著聚焦波長的變化,可以確定目標位置的變化。由于其設計采用了一系列安裝在圓柱形管內的光學透鏡,共焦傳感器通常比激光三角測量傳感器更穩定,但速度較慢,因此在高速應用中激光三角測量傳感器更具優勢。